智造赋能
数创未来




动态正文
破解AGV交互难题——高仙机器人工业清洁解决方案详解
2022-05-06
2021年,中国工业应用移动机器人(AGV)市场呈现出超预期的高速增长,据最新发布的《2021年度中国工业应用移动机器人产业发展研究报告》显示,2021年度,中国市场企业整体销售工业应用移动机器人72000台,较2020年增长75.61%,市场销售额达到126亿元,同比增长64%。
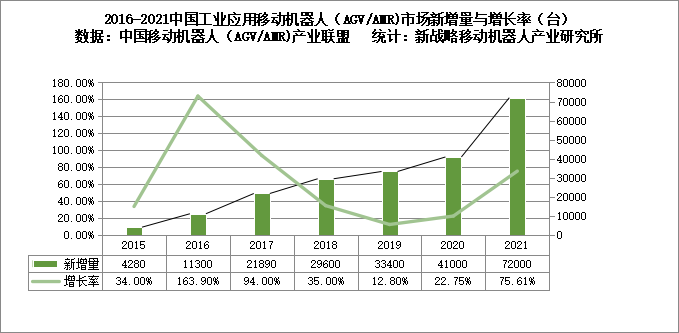
图表:2015-2021中国市场企业工业应用移动机器人(AGV/AMR)新增量(台)与增长率
AGV高速发展的背后,是适龄劳动力供给趋减的社会因素驱动,也是产业转型升级、智能制造的必然要求,再叠加新冠疫情的催化作用。
在工业场景,我们看到,不仅是AGV,自主移动的清洁机器人也得到越来越广泛的应用,助力提高工厂智能化水平,减少人工。
相比人工清洁,机器人还能避免高粉尘、放射性等有毒有害工业环境对人体健康的伤害,24小时无缝作业。
工业场景复杂 AGV难交互
然而,在工业AGV场景下,如何在确保生产效率和安全的前提下,保证清洁效果,是摆在厂
家面前的一道难题,由于场景的特殊性,自主清洁需要破解三道难关。
地面类型多样,清洁需求繁多。工业场景常见的地面类型有环氧地坪、水泥、金刚砂、大理石、花岗岩、混凝土等;不同材质地面适用不同的清洁模式;清洁需求多样,比如打磨车间要去粉尘,烟草制丝车间要扫烟丝,食品加工厂要求无尘,钢铁制造车间要去油污。动态物体多,机器人定位难。工厂里既有设备、仪器、货架等静态障碍物,又有车间工人、托盘、叉车、AGV等动态障碍物,机器人面对复杂多变的环境,容易丢失定位。
难以与AGV交互协作。工业环境中,常见的AGV有叉车AGV、传统磁导AGV、自然导航AGV等。尤其是无需借助磁条、二维码等任何外部标识的自然导航AGV,其自主性强,具备实时定位导航、环境感知和路径规划能力,清洁机器人如何在作业中与各种AGV的动态交互协作,考验着机器人厂家的技术实力。

清洁机器人在工业AGV场景下的解决方案
解决工业复杂场景下的自主清洁难题,清洁机器人需要突破清洁功能和自主导航技术上的双重障碍,以高仙机器人为例,看行业领跑者如何为工业AGV场景下的清洁提供解决方案。
首先,高仙机器人拥有完整的产品矩阵,具备清扫、洗地、尘推、吸尘、去油污、消毒等多种功能,适用工业环境常见的环氧地坪、金刚砂、水磨石、防静电材质地面等多种地面材质。
工业场景下广泛使用的是高仙Scrubber 75、Scrubber 50清洁机器人。这两款机器人都具备洗地、尘推、清扫功能,针对工业场景污渍沉积渗透、多重油污区的特征,Scrubber 75特有工业油污清洁模式,可去除轮胎印、标识线污渍、油污等。
其次,作为全球最早从事自主移动技术研发和应用的高科技公司之一,高仙拥有成熟的SLAM导航技术,清洁机器人具备自主建图定位和导航避障能力,自适应复杂多变的环境。
以避障为例,高仙机器人配备激光雷达、深度摄像头、毫米波雷达、防碰撞等多种传感器,可实现整车360度障碍物检测,通过传感器来收集深度、高度、距离、图像等多种数据。数据传输到机器人内的计算机,做出决策,并将指令传递给动力系统,使其做出停止、避让等动作。
再次,针对AGV交互难的痛点,高仙通过与AGV头部企业强强联合,设计相应的解决方案。具体来说,通过开放的TCP/IP协议交互,将清洁机器人纳入AGV调度系统内,实现与AGV的交通管制;以心跳报文作为双方交互在线检测,实现实时交互,完成以下多种任务机制:
1、路网规划
清洁机器人可将SLAM导航AGV所扫描的地图进行融合,按照相同的坐标原点和地图,规划清洁机器人清洁区域和行驶路线。
2、上报位置坐标
清洁机器人可通过接口上报实时位置信息至AGV调度系统,调度系统可通过清洁机器人的实时位置信息,管理与AGV的行驶任务和双方避障规则。
3、进入通道执行清洁任务
清洁机器人进入通道前,向AGV调度系统申请进入该通道,调度系统判断通道内符合准入条件后放行,当清洁任务执行中有AGV需要进入,调度系统判断是同向进入或逆向进入,发送清洁机器人继续前行或掉头驶离避让AGV。
4、申请通过十字路口
在清洁机器人通过十字路口时,需向AGV调度系统申请占用空间区域,AGV调度系统可判断此时AGV的行驶状态判断是否放行,允许清洁机器人通过该路口。
5、申请自动门
当自动门已并入AGV调度系统内时,清洁机器人可通过接口,在到达自动门前置点时向调度系统申请开门,得到开门到位指令后通过自动门,到达自动门后置点后,上报关门请求。
6、申请电梯
当电梯控制系统已并入AGV调度系统内时,清洁机器人可通过接口,在到达电梯前置点时向调度系统申请开门,得到电梯开门到位指令后进入电梯并上报关门请求,到达指定楼层后,驶离电梯。
对于较为简单的交互场景,也可以通过机器人自身的避障能力,结合定制化的部署,实现与AGV的同场景运行。
在较为宽敞的工业场景,与数量较少的叉车AGV同场景运行,双方通过各自的避障激光、视觉等传感器检测对方,当驶入安全距离内后,叉车AGV触发停障,清洁机器人进行绕障,当清洁机器人驶出AGV安全区域后,AGV继续启动行驶。
在紧凑型工厂,但AGV的运行路线较为单一,且交叉路口也较少的场景,清洁机器人通过优化路线部署,与AGV同速同向行驶,在不影响AGV运行情况下,最大效率地清洁AGV行驶区域;同时,采用多任务组合模式,在无AGV运行的其他空白区域,自主规划清洁路线,极大降低对于生产的影响,提高工厂清洁品质。
实现工业AGV场景下自主清洁的同时,高仙云平台也为客户带来了更多便捷的管理方式。用户通过登陆高仙云平台网页端或手机APP端,可实时了解清洁机器人的工作状态,并远程控制清洁机器人的任务。同时,清洁任务生成的任务报告,也可通过网页及手机APP端推送至用户,帮助用户进行管理及运维。
高仙云平台丰富的接口,也可接入用户的智慧大屏,显示清洁机器人的位置、状态、报警等信息,远程启动任务等功能。
目前,高仙Scrubber 75、Scrubber 50已广泛适用于新能源如锂电池、太阳能光伏,汽车主机厂及零部件,3C电子,物流仓储等行业。
未来,高仙将与更多企业合作,针对工业场景的不同需求,合作开发更丰富的场景应用,为不同业态的客户提供高效的解决方案,让自主清洁释放更大价值。
返回列表